en

Our Mission
OSIRIS designs a modular orbital system for the interception and retrieval of space debris in LEO. At the heart of the project is an innovative robotic arm, equipped with a gripper capable of snagging debris in tumbling — uncontrolled free rotation — without capture nets, actively dissipating rotational kinetic energy and enabling multiple sequential captures. An unprecedented technical approach, designed to operate where conventional systems fail.
Why Space Debris?
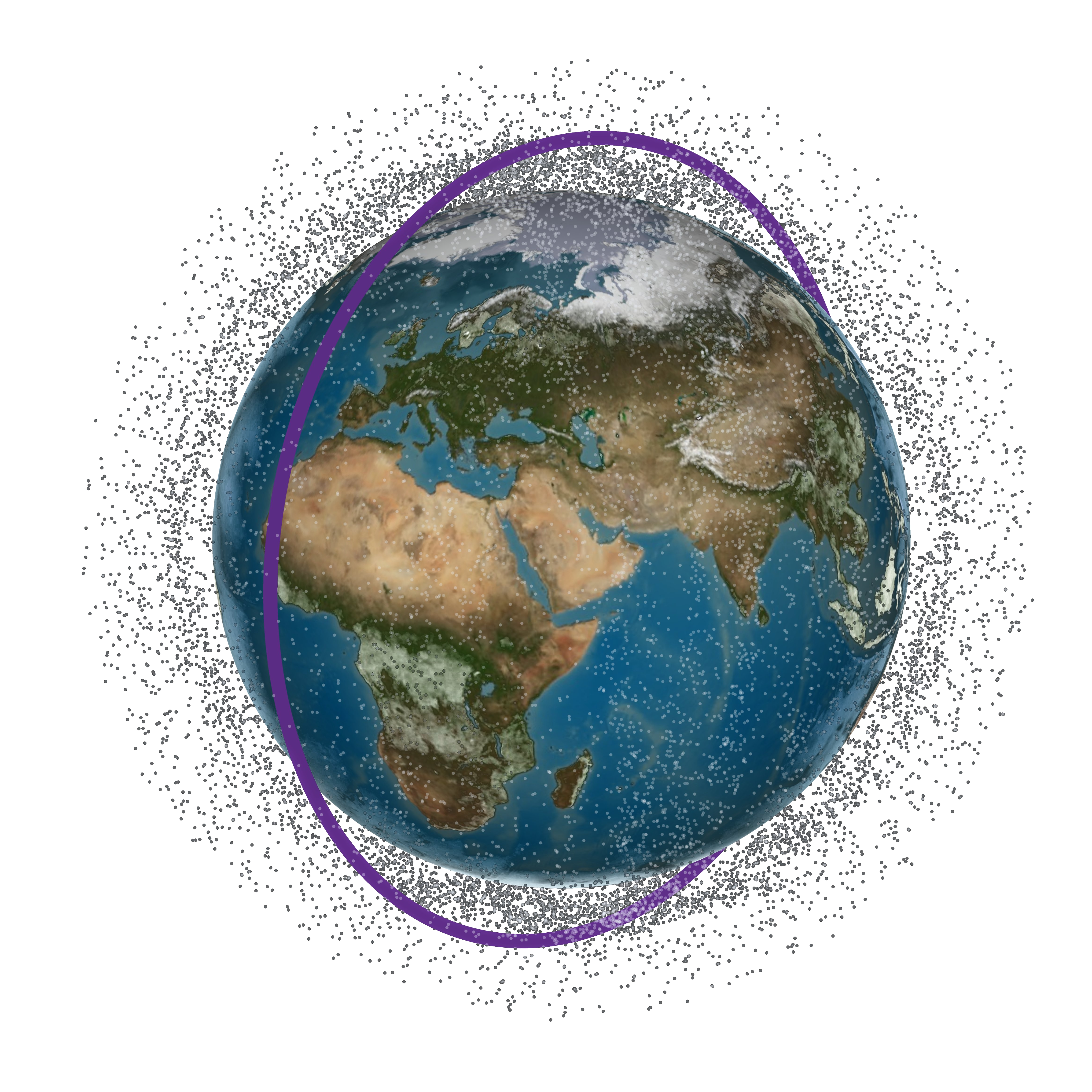
Over 8,000 tons of orbiting mass, 140 million fragments, increasingly congested orbits: space debris is not a future problem, it’s a present crisis. OSIRIS tackles this challenge with an alternative paradigm to deorbiting — retrieval, consolidation, and relocation — transforming a threat to orbital safety into a resource for the space economy of the next decade.
Why the Moon?
The Moon is the natural destination of a circular space economy: absence of atmosphere, low gravity, and strategic location make it the ideal logistical node for storing and processing materials recovered from Earth orbit. Redirecting debris towards the cislunar environment means removing significant masses from the atmospheric reentry cycle and providing structural raw materials — aluminum, titanium, components already qualified for space — to future surface infrastructures and deep space missions.

Mission Pillars
Mission Architecture
The OSIRIS system is built around a modular architecture that decouples the three core operational phases - collection, consolidation and transport - maximizing logistics efficiency and reducing dependence on Earth launches. At its centre is an orbital hub placed on an orbit selected to balance access to the debris population, manoeuvre budget for the operational units and compatibility with cislunar transfer trajectories. From the hub, daughter stations execute multiple rendezvous campaigns in an optimized sequence, returning periodically to the central node to deposit recovered material. Once a critical consolidated mass threshold is reached, a vehicle launched from Earth performs the rendezvous with the hub to transfer the payload to cislunar orbit, where the material will be available for in situ operations supporting future lunar infrastructure. This scheme cleanly separates the collection and transport phases, enabling scalable space logistics oriented toward resource reuse.
OSIRIS Hub
The hub is the permanent node of the OSIRIS architecture: it stores recovered material in safe stowage configurations, manages docking interfaces with the daughter stations and coordinates communications with ground segments and transport vehicles. Its station-keeping orbit is selected through multi-objective optimization over accessible debris density, visibility from ground stations and compatibility with cislunar transfer windows, while remaining repositionable over time as the target population evolves. The daughter stations are the system’s operational units: autonomous interception platforms optimized for high-precision proximity navigation and propellant-efficient manoeuvring. They operate in dynamic coordination with the hub, which plans interception trajectories through an optimization algorithm that maximizes the targets reachable per unit of delta-v, enabling serial multi-debris campaigns within a single mission cycle.
APEX 1.0
The APX 1.0 model - visible here in its CAD configuration - is the first stage of an incremental development path: an in-house platform built to acquire structural, kinematic and control expertise in the construction of space robotic arms. It is not the flight system, but the technical basis on which the operational prototype is being developed, planned for the 2027-2028 period. The final system will introduce an innovative gripper capable of latching onto tumbling debris without relying on capture nets - which constrain each cycle to a single target - while actively dissipating rotational kinetic energy without transmitting impulsive loads to the arm structure. This approach enables multiple captures per cycle, turning the daughter stations into high-density operational collection systems.